diff --git a/Variant-SKATEBOARD.md b/Variant-SKATEBOARD.md
index fd4de5f..62a8b98 100644
--- a/Variant-SKATEBOARD.md
+++ b/Variant-SKATEBOARD.md
@@ -14,6 +14,11 @@ Please also check the [parameters](https://github.com/EFeru/hoverboard-firmware-
* Connect the receiver signal to green wire on right sensor cable(shorter)
* Connect the receiver to ground, ⚠️ On some boards, the black wire is 15v !!! Check with a multi-meter to make sure 15V and ground are not swapped
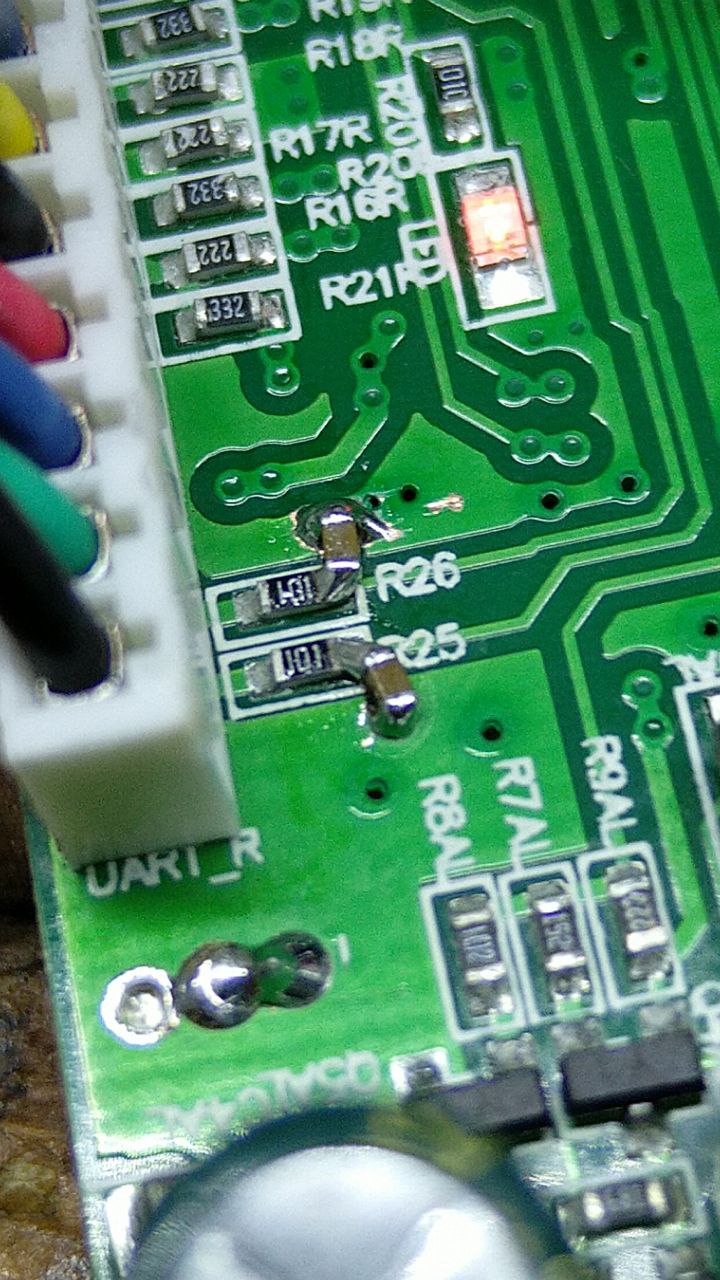
+As the speed/load increases, there can be a lot of noise in the PWM signal, triggering unwanted movements :
+* Keep cables short, use shielded cable, use ferrites, stabilize voltage
+* You can scratch the pcb and solder 100nf capacitors to ground, that will act as a RC filter and reduce the signal noise
+ +
## :control_knobs: Calibration:
Proceed with [calibration](https://github.com/EFeru/hoverboard-firmware-hack-FOC/wiki/Input-Calibration) for better control.
+
## :control_knobs: Calibration:
Proceed with [calibration](https://github.com/EFeru/hoverboard-firmware-hack-FOC/wiki/Input-Calibration) for better control.
This variant is expecting only one mid-resting input, calibration will be rejected otherwise.