forked from lucysrausch/hoverboard-firmware-hack
Saved README.md with Dillinger.io
This commit is contained in:
@@ -9,7 +9,6 @@ This repository improves significantly the performance of the previous BLDC moto
|
|||||||
- automatic phase advance / field weakening
|
- automatic phase advance / field weakening
|
||||||
|
|
||||||

|

|
||||||

|
|
||||||
|
|
||||||
A classification of the BLDC control methods in terms of performance is as follows:
|
A classification of the BLDC control methods in terms of performance is as follows:
|
||||||
|Control method| Torque output | Noise performance | Efficiency |
|
|Control method| Torque output | Noise performance | Efficiency |
|
||||||
@@ -24,7 +23,7 @@ A classification of the BLDC control methods in terms of performance is as follo
|
|||||||
A short video showing the noise performance of the Commutation method vs Sinusoidal 3rd harmonic can be found here:
|
A short video showing the noise performance of the Commutation method vs Sinusoidal 3rd harmonic can be found here:
|
||||||
[►Video: Commutation method vs Sinusoidal 3rd harmonic](https://drive.google.com/file/d/1vC_kEkp2LE2lAaMCJcmK4z2m3jrPUoBD/view)
|
[►Video: Commutation method vs Sinusoidal 3rd harmonic](https://drive.google.com/file/d/1vC_kEkp2LE2lAaMCJcmK4z2m3jrPUoBD/view)
|
||||||
** A more detailed and better movie will come soon... so stay tuned ;)
|
** A more detailed and better movie will come soon... so stay tuned ;)
|
||||||
|

|
||||||
---
|
---
|
||||||
GENERAL NOTES:
|
GENERAL NOTES:
|
||||||
- All the calibratable motor parameters can be found in the 'BLDC_controller_data.c'. I provided you with an already calibrated controller, but if you feel like fine tuning it feel free to do so.
|
- All the calibratable motor parameters can be found in the 'BLDC_controller_data.c'. I provided you with an already calibrated controller, but if you feel like fine tuning it feel free to do so.
|
||||||
@@ -51,7 +50,7 @@ Additionally, you can also flash using the method described below in the Flashin
|
|||||||
---
|
---
|
||||||
|
|
||||||
## Hardware
|
## Hardware
|
||||||
|

|
||||||
|
|
||||||
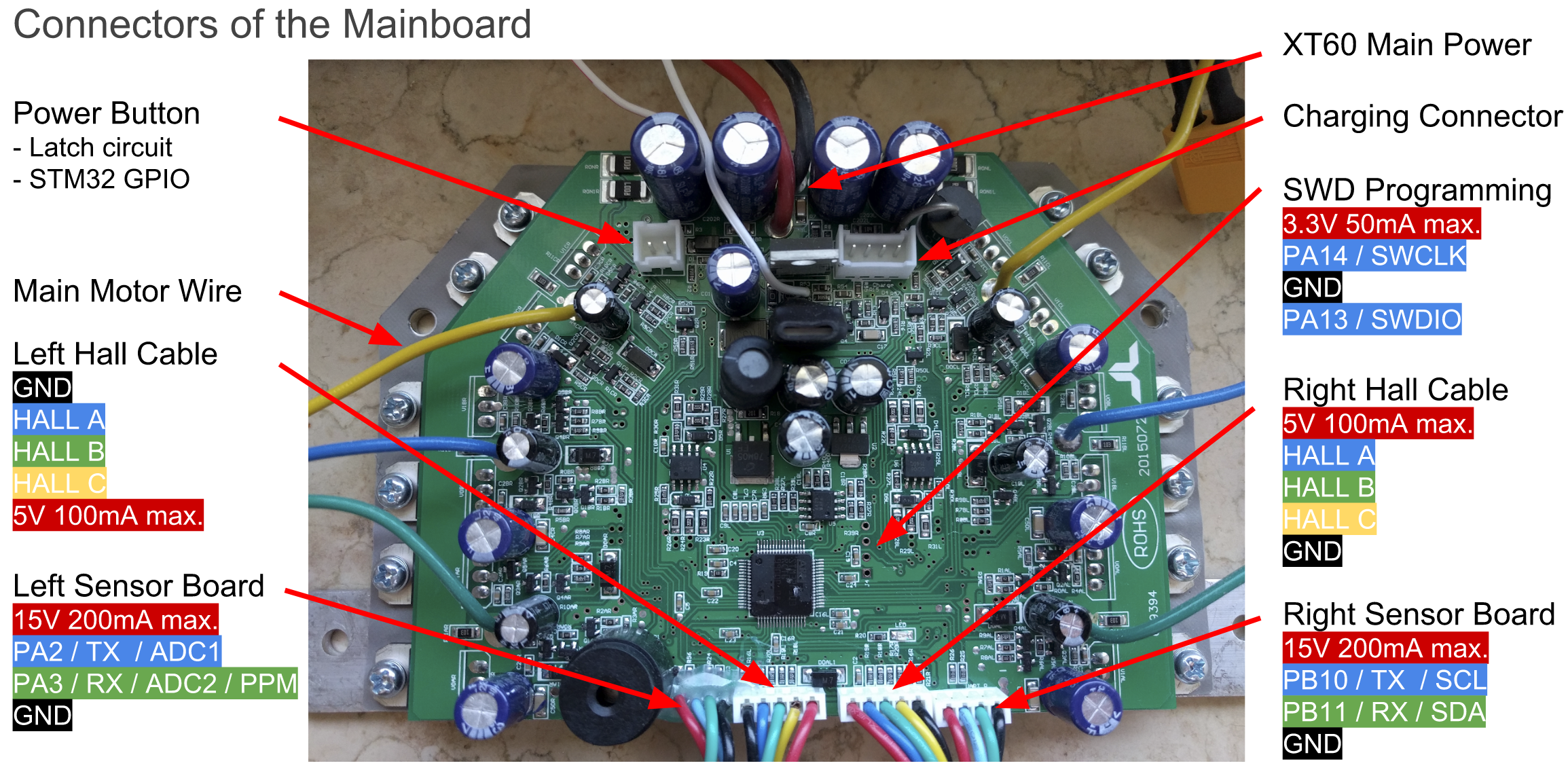
The original Hardware supports two 4-pin cables that originally were connected to the two sensor boards. They break out GND, 12/15V and USART2&3 of the Hoverboard mainboard.
|
The original Hardware supports two 4-pin cables that originally were connected to the two sensor boards. They break out GND, 12/15V and USART2&3 of the Hoverboard mainboard.
|
||||||
Both USART2 & 3 can be used for UART and I2C, PA2&3 can be used as 12bit ADCs.
|
Both USART2 & 3 can be used for UART and I2C, PA2&3 can be used as 12bit ADCs.
|
||||||
|
|||||||
Reference in New Issue
Block a user