forked from lucysrausch/hoverboard-firmware-hack
Update README.md
This commit is contained in:
@@ -8,6 +8,9 @@ This repository improves significantly the performance of the previous BLDC moto
|
||||
- improved motor efficiency. Thus, lower energy consumption
|
||||
- automatic phase advance / field weakening
|
||||
|
||||
### For more features check-out my [new firmware based on FOC motor control](https://github.com/EmanuelFeru/hoverboard-firmware-hack-FOC)
|
||||
|
||||
|
||||
|
||||
|
||||
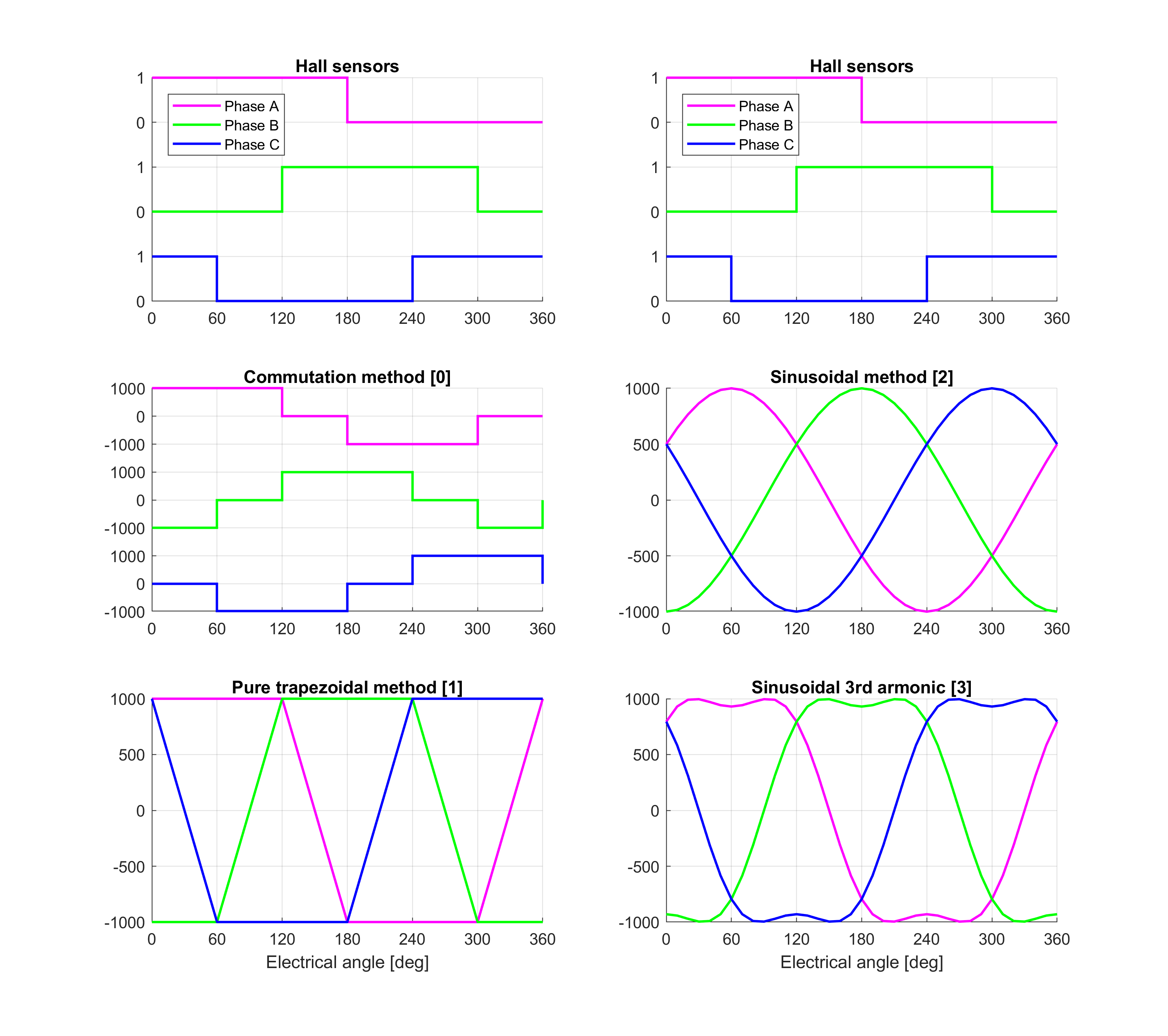
A classification of the BLDC control methods in terms of performance is as follows:
|
||||
@@ -42,10 +45,6 @@ NOTES Phase Advance / Field weakening:
|
||||
- If you re-calibrate the Phase advance map please take all the safety measures! The motors can spin VERY VERY FAST! Please use it with care!
|
||||
- I do not recommend more than 40 deg MAX Phase advance.
|
||||
|
||||
### Future work
|
||||
- we will try to fit this new controller into the hoverboard main functionality of [bipropellant](https://github.com/bipropellant/bipropellant-hoverboard-firmware) I still need to ask if he would like to take this up :)
|
||||
- use it for other robotic applications
|
||||
|
||||
---
|
||||
## Building
|
||||
For building (and flashing) I recommend platform.io, plaformio.ini file included. Simply open the folder in the IDE of choice (vscode or Atom), and press the 'PlatformIO:Build' or the 'PlatformIO:Upload' button (bottom left in vscode).
|
||||
|
||||
Reference in New Issue
Block a user