forked from EFeru/bldc-motor-control-FOC
- added possbility to switch the Control mode while motor is spinning
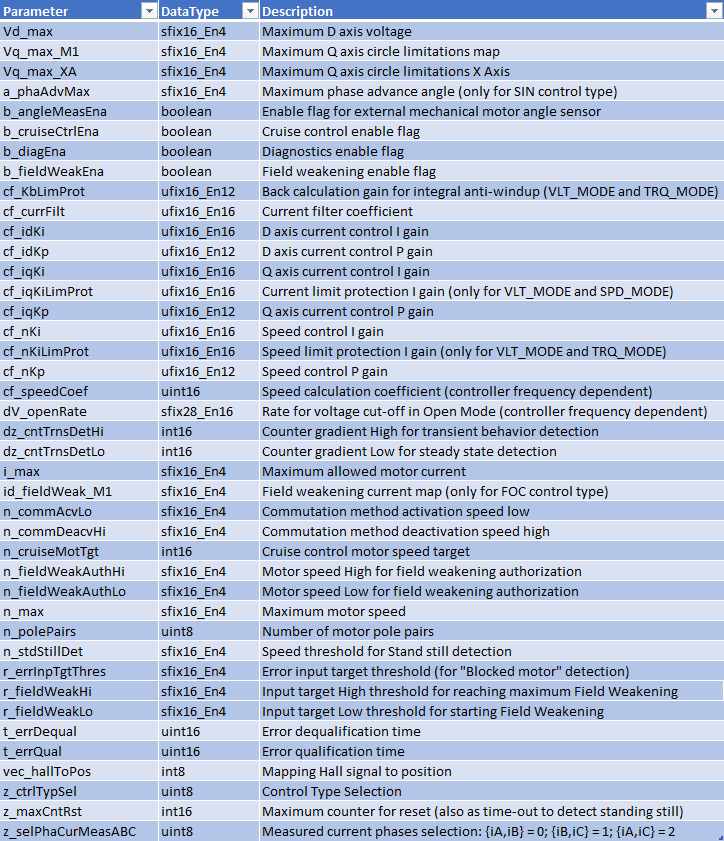
- added support for Cruise control: activated by b_cruiseCtrlEna, where the target to set is n_cruiseMotTgt. (Needs small aditional handling on the application firmware to set the n_cruiseMotTgt properly to the current operation speed, immediately after activation via b_cruiseCtrlEna).
- extended Phase current measurements z_selPhaCurMeasABC : {iA,iB} = 0; {iB,iC} = 1; {iA,iC} = 2
- added interface for external motor angle measurement from as sensor, e.g., encoder. The selection can be done via b_angleMeasEna.
66 KiB
724x841px
66 KiB
724x841px
{kind=link}
{kind=link}
{kind=link}